The Engineer - Nature inspires entangled filaments gripper
Researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have taken inspiration from nature to develop a new robotic gripper.
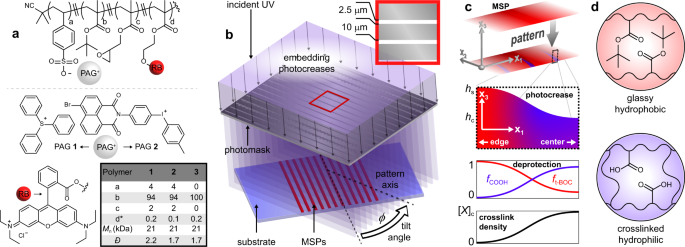
Self-spinning filaments for autonomously linked microfibers

Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision

From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper

Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision

A retrofit sensing strategy for soft fluidic robots

From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper

From grasping to manipulation with gecko-inspired adhesives on a multifinger gripper
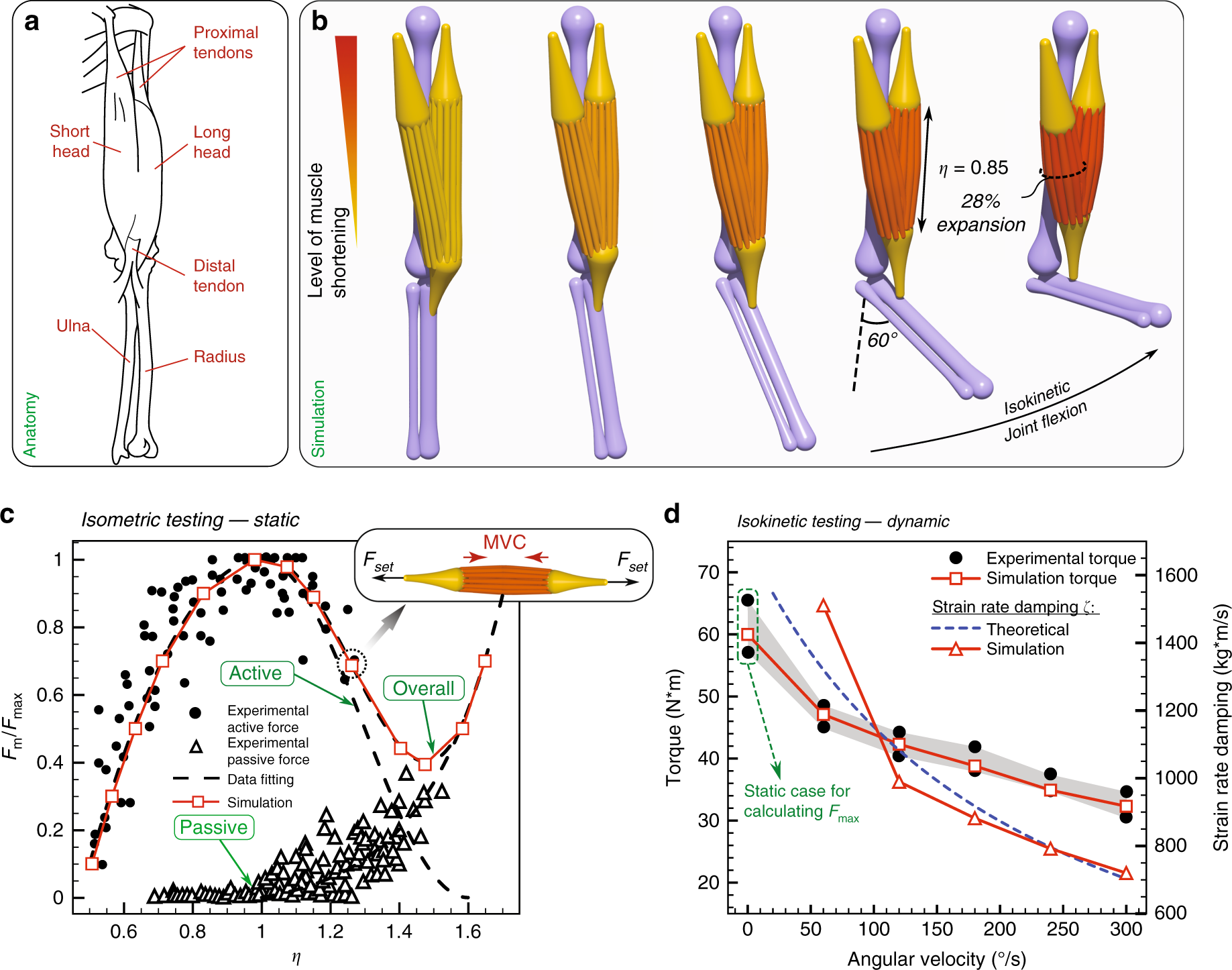
Modeling and simulation of complex dynamic musculoskeletal architectures

Bio-inspired 3D-printed lattice structures for energy absorption applications: A review - Doodi Ramakrishna, Gunji Bala Murali, 2023

Antifatigue Hydration-Induced Polysaccharide Hydrogel Actuators Inspired by Crab Joint Wrinkles
Scientists build a robot gripper with spaghetti-like tentacles

Design and Grasping Force Modeling for a Soft Robotic Gripper with Multi-stem Twining