Kinematic model of a hand: each finger has 3 joints with 4 DoF : index

PDF] Dynamic modeling and control of a 4 DOF robotic finger using adaptive-robust and adaptive-neural controllers
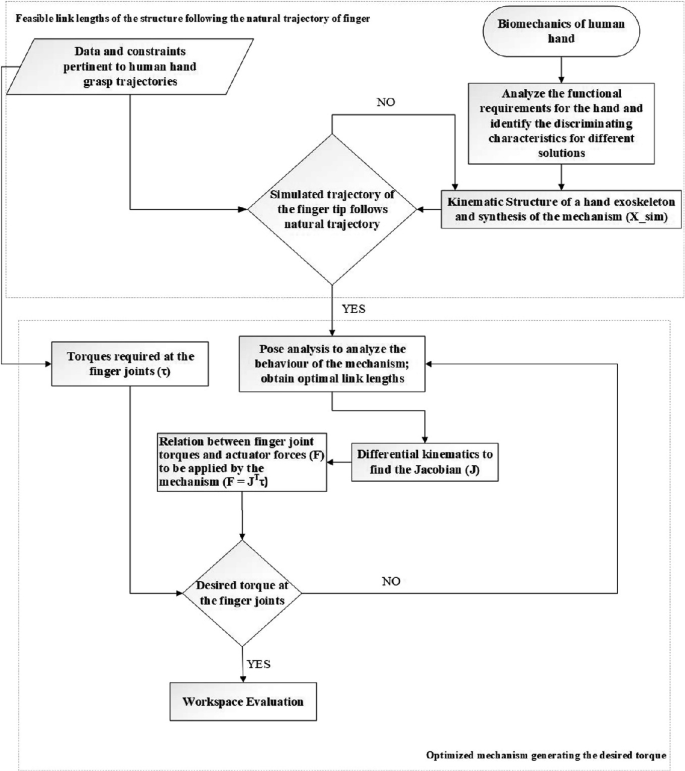
Kinematic Synthesis and Design of a Five Fingered Hand Exoskeleton

Integrated linkage-driven dexterous anthropomorphic robotic hand

Mine Sarac
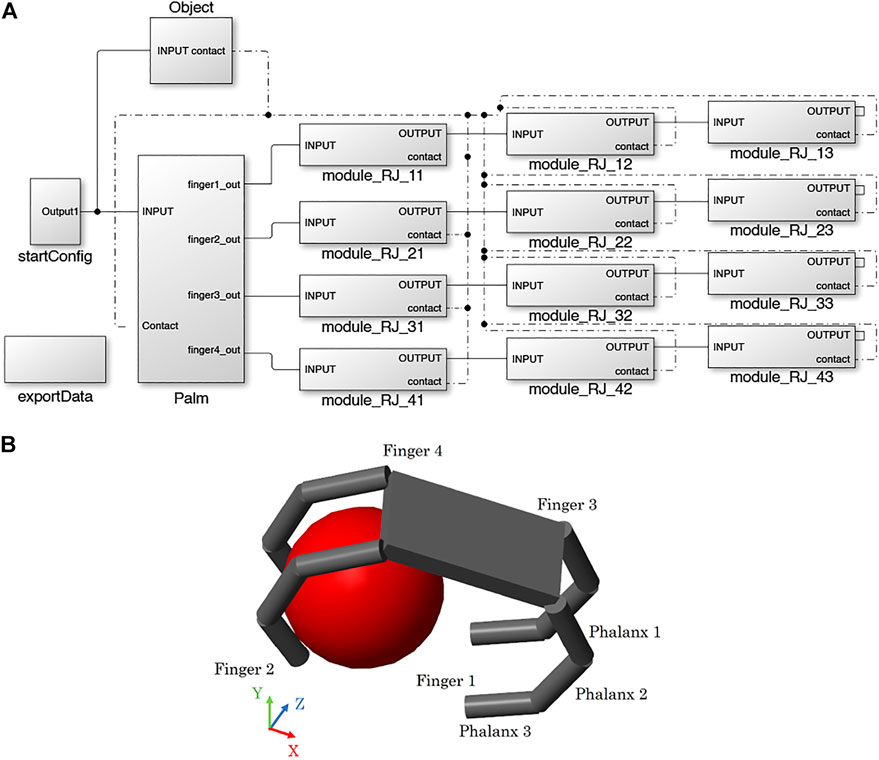
Frontiers Modeling and Simulation of Robotic Grasping in Simulink Through Simscape Multibody

Development and Evaluation of a 25-Degree of Freedom Hand Kinematic Model

Kinematic configuration of the human hand. The thumb is defined by 3

Kinematic design optimization for anthropomorphic robot hand based on interactivity of fingers
Massimiliano Solazzi's research works Scuola Superiore Sant'Anna, Pisa (SSSUP) and other places

Mine SARAC, Assist. Prof., Doctor of Philosophy

Kinematic model of index finger

PDF) Design Requirements of Generic Hand Exoskeletons and Survey of Hand Exoskeletons for Rehabilitation, Assistive or Haptic Use



/images/vimeo_thumbnails/258824510/Lh55kig4Rv1ws2vYBBBnXg_overlay.png)

/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/b0/df/b0dfa68b-07f1-4d79-a7a5-8b9b240616a2/badges-resize.jpg)

